
CALCULOS
CALCULOS ESTATICOS
Los cálculos estáticos y de solidos de la estructura que soporta todo el ensamble de Gestor se realizan por simulaciones con elementos finitos en SolidWorks. Teniendo en cuenta que la estructura se modelo como miembro estructural en tubería cuadrada de 1 pulgada de calibre 16 en acero 1020.
En la simulación se tienen las cargas que generan las masas de los componentes, teniendo 1,5 kg (14,7N) de la cabeza, 0,8 kg (7,8N) de cada brazo, 8 kg (78,5N) de la propia estructura y 19 kg (186,3N) de la carcasa de lámina calibre 16. A continuación se muestra la ubicación de las condiciones de frontera:

Resultados:

Se obtienen resultados máximos a tensión de 4,13 MPa y a compresión de 4,24 MPa, estos resultados comparados con el límite elástico del material (351MPa) nos muestran que la estructura resiste las cargas con un F.S de 87.
CALCULOS CABEZA
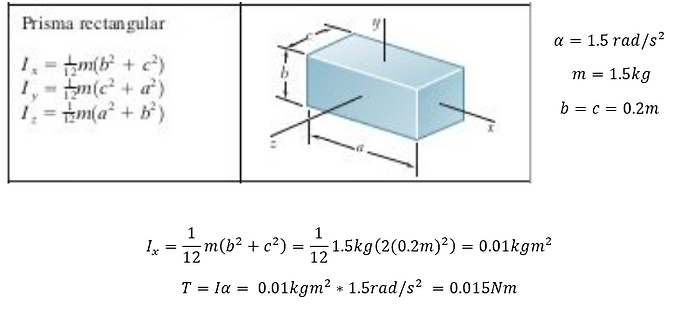
La masa de la cabeza es de 1.5 Kg y la distancia al centro de masa al eje del motor es de 3.5cm

Para el torque del segundo motor se usa el momento de inercia de la figura y la aceleración angular a la que queremos que gire.
CALCULOS MOTORES
La longitud L representa la distancia del eje del motor hasta el centro del eje del motor.



La masa total M del brazo es y la fuerza de su peso.

Los servomotores para robots pequeños se miden en Kg/cm que en realidad quiere decir kilogramo fuerza por centímetro, por lo que 10.19716Kg/cm = 1N*m
Para el segundo motor varia un poco las cargas porque se contempla la masa del primer motor que se suma sin modificar el centro de gravedad como un factor extra de seguridad.

ALIMENTACION
Para la alimentación se usará una fuente que provee salidas de 5V/3A, 12V/1A y 24V/1A. Teniendo en cuenta que cada motor consume 400mA a 4.8V, se tiene que:

Se puede alimentar 7 motores con dicha fuente. Por lo tanto, es la fuente adecuada para el trabajo. Con está configuración se logra un torque en los motores de aproximadamente 15kg-cm. Adicionalmente, se pueden usar las otras salidas para alimentar la pantalla y los parlantes sin problema. Se simulo el uso de estos motores con Proteus y Arduino:

Usando el siguiente programa, el cual usa una librería para los steps del motor. Cabe recalcar que esto es solo para pruebas, pues en el proyecto se usará el lenguaje de programación Python con la Raspberry Pi:

ESQUEMATICO DEL PROYECTO
Se presenta el plano esquemático del proyecto. La pantalla trae su propia interfaz, por lo tanto se representa como un solo componente. Los parlantes se conectan directamente a la Raspberry y los motores se manejan mediante PWM, que se puede proveer mediante los pines GPIO. En total, se requieren 6 pines para estos motores. Se presentan adicionalmente los conversores de voltaje y las fuentes requeridas para el funcionamiento del sistema.
